全國(guó)服務(wù)熱線(xiàn)
0769-85333197全國(guó)服務(wù)熱線(xiàn)
0769-853331972021-11-16 10:16:06 0
AGV舵輪組介紹
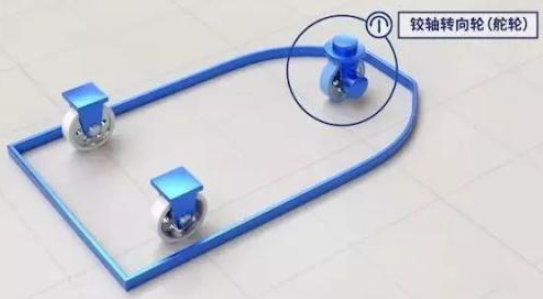
如下圖1所示,方向盤(pán)是一個(gè)不熟悉的專(zhuān)業(yè)名稱(chēng),是一個(gè)新興的智能高科技產(chǎn)業(yè)鏈。所謂方向盤(pán),是因?yàn)樗瘋鲃?dòng)、轉(zhuǎn)向、減速等機(jī)械結(jié)構(gòu)為一體,產(chǎn)品集行走、牽引、轉(zhuǎn)向功能為一體,能裝載和牽引重物是的可以快速部署AGV、移動(dòng)機(jī)器人等。完全滿(mǎn)足AGV的應(yīng)用要求。因此,方向盤(pán)是AGV應(yīng)用的發(fā)展方向。與傳統(tǒng)的AGV相比,本實(shí)用新型的方向盤(pán)更加一體化、方便、準(zhǔn)確、響應(yīng)速度快。

方向盤(pán)主要由電機(jī)、變速箱、減速器、編碼器、方向盤(pán)、方向盤(pán)、制動(dòng)器、限位開(kāi)關(guān)等組成。如下圖2所示。

方向盤(pán)機(jī)構(gòu)包括:
驅(qū)動(dòng)電機(jī)為直流電機(jī)與傳動(dòng)箱組合,采用反對(duì)稱(chēng)安裝方式。該方法在兩輪同軸且功率較大的情況下,可大大減小輪座,節(jié)省機(jī)器人體積空間。(通常是發(fā)動(dòng)機(jī)功率的一定比例)由于采用了這種安裝方式,電機(jī)的選擇比較廣泛,齒輪箱的功能可以增加扭矩,降低轉(zhuǎn)速,也可以利用鎖緊與制動(dòng)器之間的摩擦,提高了電機(jī)的使用壽命。當(dāng)需要停車(chē)時(shí),可將輪座延長(zhǎng),以滿(mǎn)足輪副的安裝要求。

AGV舵輪組產(chǎn)品特點(diǎn):
體積小:整體設(shè)計(jì),體積小,重量輕。
操作簡(jiǎn)單:自動(dòng)集成功能集中。
適應(yīng)能力強(qiáng):根據(jù)移動(dòng)設(shè)備的要求,在核心部件上安裝了防震系統(tǒng),有效地防止了設(shè)備的移動(dòng),使用過(guò)程中對(duì)核心部件產(chǎn)生了意想不到的影響。這臺(tái)機(jī)器損壞了。
各種形式:水平/垂直/交流或直流電源;
發(fā)動(dòng)機(jī)連接到轉(zhuǎn)向系統(tǒng)。
方向盤(pán)形狀
方向盤(pán)可根據(jù)電機(jī)安裝位置分為兩類(lèi):水平方向盤(pán)和垂直方向盤(pán),如下圖3所示.一般高度太低,有些AGV需要高度(例如,潛水AGV必須太低,不能在貨物下挖掘)本實(shí)用新型的優(yōu)點(diǎn)是:電機(jī)便于絕緣,在某些情況下(如危險(xiǎn)品工廠(chǎng))也便于絕緣。驅(qū)動(dòng)輪需要與外界隔離,此時(shí)垂直方向盤(pán)使用方便,易于防爆處理。
兩個(gè)驅(qū)動(dòng)電機(jī)均設(shè)有大功率齒輪傳動(dòng)機(jī)構(gòu)和上齒輪傳動(dòng)機(jī)構(gòu),在控制方式中,大功率驅(qū)動(dòng)電機(jī)用于控制在方向盤(pán)上,用一個(gè)低功率轉(zhuǎn)向馬達(dá)來(lái)控制方向盤(pán)的轉(zhuǎn)向。電機(jī)有兩種電源:交流電源和直流電源。直流電源比交流電源穩(wěn)定,控制簡(jiǎn)單,水平轉(zhuǎn)向比垂直轉(zhuǎn)向更緊湊,但價(jià)格更高。
方向盤(pán)結(jié)構(gòu)
AGV的車(chē)體結(jié)構(gòu)決定了其行駛和轉(zhuǎn)向方式,并制約著車(chē)體的動(dòng)態(tài)特性和運(yùn)動(dòng)特性。因此,在設(shè)計(jì)過(guò)程中,首先要根據(jù)使用要求確定底盤(pán)的結(jié)構(gòu),然后根據(jù)控制對(duì)象的模型建立車(chē)身的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型,選擇合適的控制根據(jù)模型參數(shù)確定控制律,以獲得滿(mǎn)意的控制效果。因此,確定正確的車(chē)身結(jié)構(gòu)是建立車(chē)身動(dòng)力學(xué)模型的基礎(chǔ)。
方向盤(pán)既能提供牽引(轉(zhuǎn)向)又能提供主動(dòng)轉(zhuǎn)向,因此方向盤(pán)具有兩個(gè)自由度。AGV可以使用一個(gè)或多個(gè)驅(qū)動(dòng)輪向四面八方移動(dòng):水平、垂直、就地、傾斜等。舵輪通常用于地面條件較好的室內(nèi)環(huán)境,因此其表面的大部分材料是聚氨酯。驅(qū)動(dòng)輪的運(yùn)動(dòng)決定了AGV的重復(fù)定位精度,因此驅(qū)動(dòng)輪的質(zhì)量對(duì)AGV的性能有很大的影響。
方向盤(pán)
AGV的底盤(pán)通常采用單方向盤(pán)、雙方向盤(pán)和四方向盤(pán)的形式,為前輪轉(zhuǎn)向控制系統(tǒng)鋪平了道路。在汽車(chē)的行駛和轉(zhuǎn)向中,實(shí)現(xiàn)全方位的行走。驅(qū)動(dòng)輪分別與伺服電機(jī)連接,調(diào)速輪可同時(shí)改變驅(qū)動(dòng)輪的轉(zhuǎn)動(dòng)方向,從而改變車(chē)輛的前進(jìn)速度和方向。這種結(jié)構(gòu)可以保證車(chē)輛的平衡和穩(wěn)定性,滿(mǎn)足工廠(chǎng)對(duì)負(fù)載的高要求。
單方向盤(pán)
本實(shí)用新型的優(yōu)點(diǎn)是:?jiǎn)屋咥GV轉(zhuǎn)向相對(duì)簡(jiǎn)單,與雙輪AGV相似,但由于單輪AGV的后輪為從動(dòng)輪匹配不需要考慮。
缺點(diǎn):車(chē)體由一個(gè)方向盤(pán)拉動(dòng),從而實(shí)現(xiàn)相對(duì)簡(jiǎn)單的工作。
雙方向盤(pán)
本實(shí)用新型的優(yōu)點(diǎn)是:通過(guò)調(diào)整兩個(gè)驅(qū)動(dòng)輪的角度和速度,在不改變車(chē)頭的情況下,可實(shí)現(xiàn)軌道、轉(zhuǎn)向等動(dòng)作的改變。該模型可以實(shí)現(xiàn)任意點(diǎn)的勻速轉(zhuǎn)彎運(yùn)動(dòng),具有很強(qiáng)的靈活性。
缺點(diǎn):兩組轉(zhuǎn)向輪增加了成本,AGV在機(jī)動(dòng)過(guò)程中往往需要對(duì)兩組轉(zhuǎn)向輪進(jìn)行協(xié)調(diào)控制,這就要求AGV和控制,增加了開(kāi)發(fā)難度和成本。

四輪驅(qū)動(dòng)
AGV小車(chē)采用四輪驅(qū)動(dòng),輪系布置結(jié)構(gòu)如下圖4所示。四個(gè)輪子分別是方向盤(pán)和方向盤(pán),每個(gè)輪子上有兩個(gè)電機(jī)分別控制,電機(jī)控制車(chē)輛的行駛,電機(jī)控制車(chē)輛的轉(zhuǎn)向,可以實(shí)現(xiàn)車(chē)輛在縱向、橫向、旋轉(zhuǎn)等方向。整個(gè)方向盤(pán)具有驅(qū)動(dòng)靈活、能在狹小空間內(nèi)自由移動(dòng)、無(wú)需算法麻煩等優(yōu)點(diǎn)。本實(shí)用新型通過(guò)匹配轉(zhuǎn)速和旋轉(zhuǎn)方向,可以實(shí)現(xiàn)移動(dòng)車(chē)輛的全方位運(yùn)動(dòng)。缺點(diǎn)是整個(gè)結(jié)構(gòu)比較復(fù)雜。
四輪轉(zhuǎn)向的全方位結(jié)構(gòu)
方向盤(pán)控制
AGV車(chē)輛通過(guò)內(nèi)部和外部傳感器感知外部環(huán)境信息和狀態(tài),并完成相應(yīng)的動(dòng)作。AGV車(chē)輛根據(jù)從轉(zhuǎn)向傳感器獲得的位置信息向車(chē)輛控制器發(fā)送車(chē)輛信號(hào),并根據(jù)車(chē)輛提供的目標(biāo)值計(jì)算車(chē)輛的實(shí)際行駛值。道路.因此,控制方向盤(pán),AGV車(chē)輛根據(jù)行駛路線(xiàn)在路面上行駛。因此,方向盤(pán)的協(xié)調(diào)控制非常重要。控制方向盤(pán)保持同步,可以控制地面AGV車(chē)輛的前進(jìn)、后退、旋轉(zhuǎn)、轉(zhuǎn)彎等一系列動(dòng)作。







技術(shù)微信